Disney od dziesięcioleci specjalizuje się w ożywianiu wyobraźni, powołał więc specjalne centrum inżynieryjno-badawcze, aby jego filmowe produkcje mogły korzystać ze zdobyczy nowych technologii.
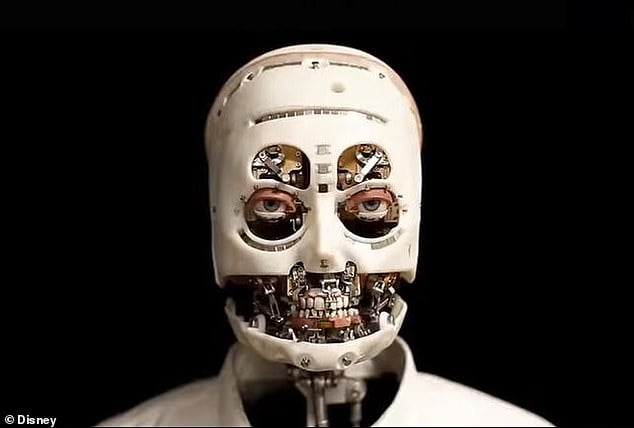
W ostatnich dniach października Disney Research Hub zaprezentowało robotyczne, bezskórne, humanoidalne popiersie, z odsłoniętymi dziąsłami i zębami, a także ruchomymi gałkami ocznymi, powiekami i brwiami, które nadają robotowi niepokojąco ludzki wygląd.
Nowy robot Disneya jest wyposażony w umieszczony na klatce piersiowej czujnik wykrywania ruchu. Pozwala on robotowi „zauważyć”, że ktoś w jego otoczeniu próbuje nawiązać z nim interakcję. To uruchamia serię silników sterujących ruchami robota.
Silniki umożliwiają imitowanie aktywności takich jak oddychanie, mruganie czy sakady (szybkie, skokowe ruchy gałek ocznych), tworząc coraz bardziej złożone i przypominające prawdziwie ludzkie zachowania.
Robot ma być wykorzystywany w produkcjach filmowych jako narzędzie animatroniki. Animatronika to określenie oznaczające tworzenie efektów specjalnych, w oparciu o sterowanie kukiełkami, makietami, robotami czy innymi obiektami za pomocą urządzeń elektromechanicznych.
Walt Disney przygodę z animatroniką zaczynał od zmechanizowanego zabawkowego ptaszka, co zrodziło pomysł stworzenia mechanicznych konstrukcji naśladujących żywe istoty.
Dziś Disney Imagineers nadal pracują nad ulepszeniem swojego odkrycia, ale uważają, że ostatecznie znaleźli metodę, która zmienia metalowe maszyny w roboty podobne do ludzi.
„Przedstawiamy ogólną architekturę, która ma na celu nie tylko tworzenie interakcji spojrzenia z technologicznego punktu widzenia, ale także przez pryzmat animacji postaci, w której wierność i wiarygodność ruchu jest najważniejsza. Staramy się stworzyć interakcje, która demonstruje iluzję życia” – napisali inżynierowie Disneya w artykule opisującym wynalazek.

Zakres ruchu robota to zaledwie 19 stopni. W czasie interakcji (wykonywanych ruchów) wykorzystuje on jedynie szyję, oczy, powieki i brwi, a wszystkie te elementy są kontrolowane przez autorskie oprogramowanie.
Czujnik zamontowany na klatce piersiowej w połączeniu z kamerą służy do identyfikacji osób w polu widzenia robota i określa, jaka interakcja będzie najbardziej pożądana w odpowiedzi na zachowanie gościa. Określa to na podstawie „oceny ciekawości”.
„Silnik uwagi generuje „ocenę ciekawości” przypisaną danej osobie, wskazującą na jej zainteresowanie, a także na to, jak ważne jest, aby zachowanie robota na nie odpowiadało” – czytamy w opisie.
Zespół zaprogramował „silnik uwagi” tak, aby gromadził trójwymiarowe pozycje osób wykrytych w kamerze. Pozwala to systemowi zidentyfikować, którzy ludzie wykonują gesty mające angażować robota, takie jak machanie czy uśmiechanie się.
„Sposób, w jaki obliczana jest ocena ciekawości w naszym obecnym systemie, jest dość uproszczony i opiera się na lokalizacji i prędkości rąk i nosa” – napisali Imagineers. Ocenę ciekawości oparli na tych dwóch cechach, ponieważ są one powiązane z zachowaniem osób, które próbują przyciągnąć czyjąś uwagę, najczęściej zbliżając się do tej osoby czy żywo gestykulując.
Kolejna warstwa budowy robota to tzw. „mechanizm wyboru zachowania”. Na tym etapie system decyduje, jak ma zachować się robot w odpowiedzi na zarejestrowany bodziec. Opcje obejmują m.in. czytanie, spoglądanie i przytakiwanie. Ten mechanizm rejestruje również informacje o napotkanej osobie, np. kiedy przybyła po raz pierwszy i kiedy opuściła pole widzenia robota.
Inżynierowie twierdzą, że informacje te są automatycznie usuwane, gdy interesant opuszcza pole widzenia robota, a ich rejestrowanie ma na celu pomóc robotowi w scharakteryzowaniu każdego gościa, w szczególności lokalizacji jego oczu i nosa tak, aby mógł lepiej współdziałać z danym człowiekiem.
„Wydaje się, że poprzez nakładanie prostych zachowań na siebie jesteśmy w stanie generować złożone reakcje na bodźce środowiskowe. Ta architektura jest wysoce rozszerzalna i może być wykorzystywana do tworzenia coraz bardziej złożonych animatronicznych modeli” – mówią twórcy.