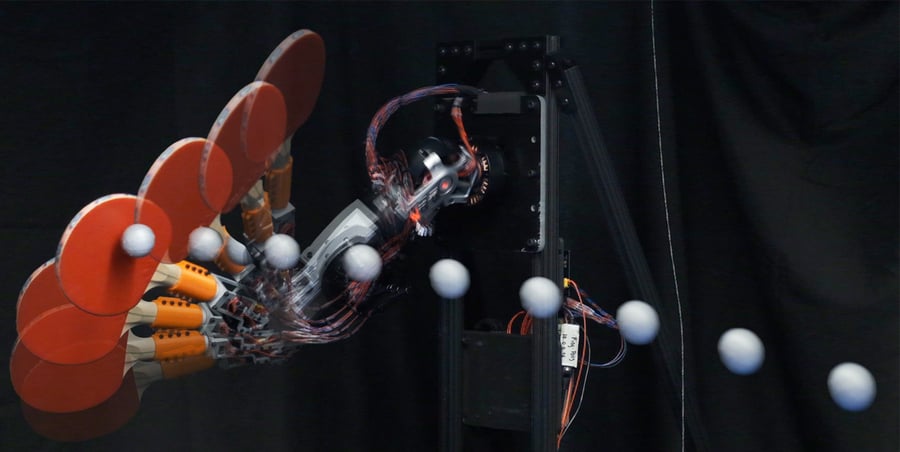
Zespół inżynierów z Massachusetts Institute of Technology (MIT) stworzył robota, który w czasie rzeczywistym analizuje tor lotu piłeczki pingpongowej, wybiera optymalny typ uderzenia – od prostych drive’ów po trudne do odebrania chop’y z podcięciem – i odsyła ją z powrotem z prędkością sięgającą 68 km/h. Zainspirowany anatomią człowieka, robot wykorzystuje ramię o czterech stopniach swobody oraz dodatkowy przegub w nadgarstku, co pozwala na precyzyjne manewrowanie standardową rakietką. Całość kontrolowana jest przez zestaw komputerów analizujących w czasie rzeczywistym obraz z kamer o wysokiej częstotliwości. Wszystko dzieje się szybciej niż ludzkie oko zdąży zarejestrować pierwszy ruch przeciwnika.
Robot MIT gra w ping-ponga jak człowiek
W warunkach laboratoryjnych robot stanął przed zadaniem odbicia 150 piłek z dużą częstotliwością. Poradził sobie znakomicie – skuteczność jego zwrotów przekroczyła 88 proc. niezależnie od wybranego stylu. W przypadku uderzenia topspinowego trafił 88,4 proc. piłek, przy backspinie – 89,2 proc., a przy prostych drive’ach – 87,5 proc. Uderzenie następowało z prędkością dochodzącą do 19 m/s, co czyni go jednym z najszybszych robotów w historii tego typu projektów. Dla porównania – doświadczeni gracze osiągają średnio 21-25 m/s. To oznacza, że maszyna z MIT zbliża się do granic ludzkich możliwości.
Czytaj też:Nowy rekord świata! Robot rzuca do kosza lepiej niż człowiek
Chociaż projekt rozpoczął się od rekreacyjnej gry, jego twórcy mają znacznie ambitniejsze plany. Ping-pong to bowiem doskonałe pole testowe dla zaawansowanych systemów predykcji ruchu i szybkiego podejmowania decyzji. Jak tłumaczy David Nguyen, doktorant z MIT i współautor badania, gra łączy elementy precyzyjnej manipulacji z dynamicznym ruchem – dokładnie tych samych zdolności, które będą kluczowe w przyszłości dla robotów pracujących w nieprzewidywalnych środowiskach, takich jak misje ratownicze, interwencje w przestrzeniach katastrof czy nawet codzienne interakcje z ludźmi.

Roboty grające w ping-ponga nie są nowością – już w latach 80. ubiegłego wieku naukowcy próbowali stworzyć maszyny zdolne do odbijania piłeczki z człowiekiem. W ostatnich latach duże postępy osiągnęły firmy, takie jak Omron czy Google DeepMind, wykorzystując AI i uczenie maszynowe do analizy setek tysięcy rozgrywek. Jednak urządzenie MIT wyróżnia się tym, że nie polega na danych historycznych – uczy się i reaguje tu i teraz, kalkulując parametry fizyczne oraz trajektorie lotu w czasie rzeczywistym.
Ramię robota opiera się na konstrukcji znanej już z innych projektów MIT – dwunożnego robota humanoidalnego wielkości dziecka. Każde z jego ramion składa się z czterech silników elektrycznych, a do systemu dodano specjalny przegub nadgarstkowy, pozwalający na pełniejsze panowanie nad rakietką. Konstrukcja ta może być w przyszłości wykorzystana także do bardziej złożonych zadań niż sport – od manipulacji narzędziami po interakcje z ludźmi. Zespół Sangbae Kima z MIT Biomimetics Robotics Lab testował już te konstrukcje w warunkach wymagających: skakanie, bieganie, a nawet chodzenie po nierównym terenie.
Obecna wersja robota jest statyczna – zamontowana na jednym końcu stołu, ogranicza się do odbijania piłek w ograniczonej przestrzeni. Ale zespół MIT planuje przenieść urządzenie na platformę mobilną, co pozwoli mu reagować na więcej typów uderzeń z różnych pozycji. Celem jest stworzenie robota, który nie tylko odbije piłkę, ale też przewidzi strategię przeciwnika i nauczy człowieka skuteczniejszej gry. Taka maszyna mogłaby pełnić rolę trenera, który naśladuje ludzkich przeciwników, zmuszając zawodników do szybszych reakcji i bardziej świadomych decyzji.