Maszyna ta pozwala na błyskawiczne testowanie, jak proporcje kończyn i rozkład masy wpływają na prędkość oraz zużycie energii u zwierząt. To przełomowe podejście, które wyjmuje biomechanikę z ram teoretycznych symulacji i przenosi ją na fizyczny poligon doświadczalny, dając odpowiedzi na pytania, których nie da się zadać żywym organizmom.
Modułowość w służbie biologii – 60 milionów lat ewolucji w 20 minut
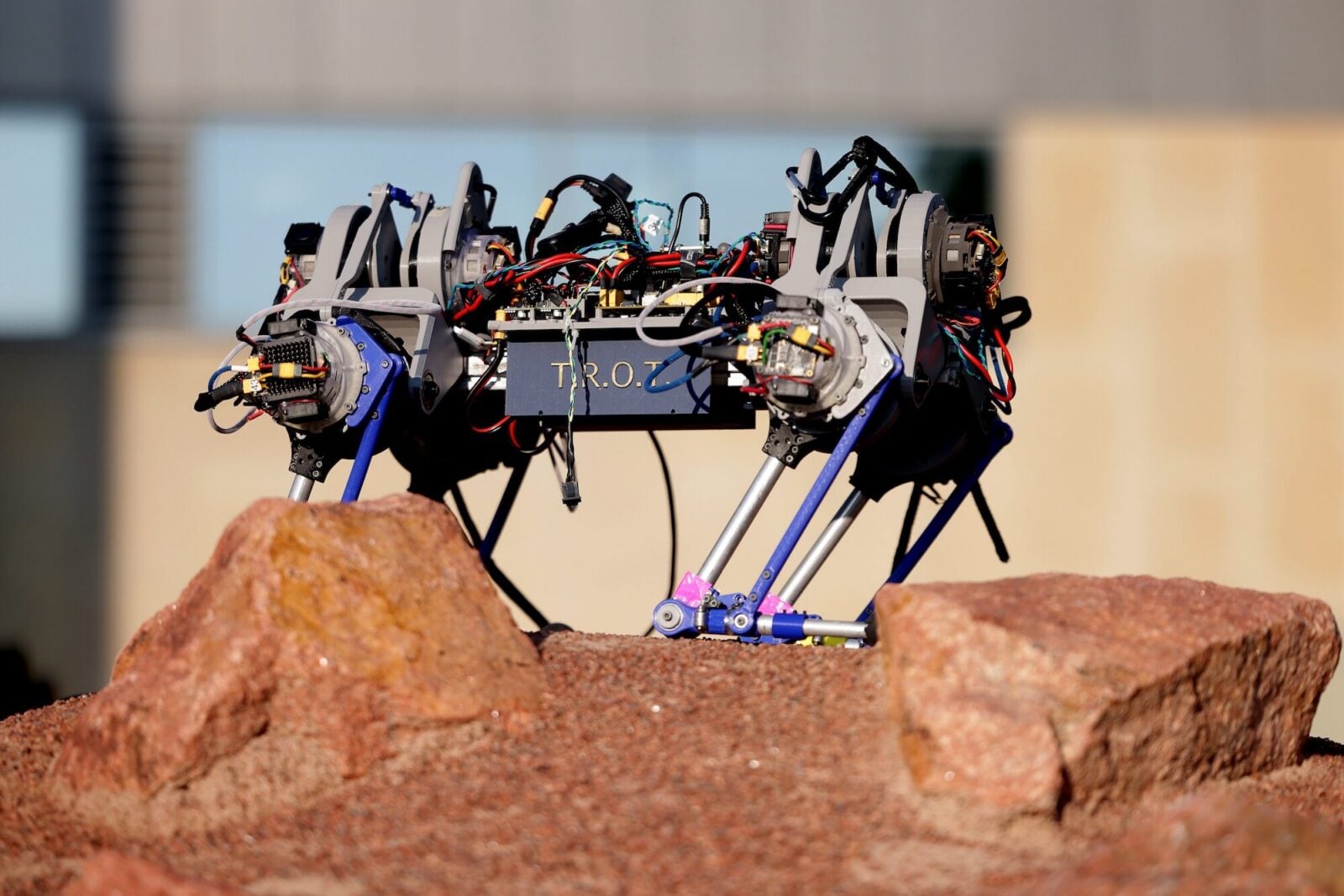
Robot otrzymał nazwę The Robot of Theseus (TROT), co jest bezpośrednim nawiązaniem do antycznego paradoksu o statku Tezeusza, w którym wymieniano wszystkie deski. W przypadku TROT-a ta filozofia ma wymiar praktyczny: maszyna jest zbudowana z ogólnodostępnych silników i części wydrukowanych na drukarkach 3D. Dzięki temu całkowity koszt budowy zamyka się w kwocie poniżej 4 000 dolarów, co czyni go dostępnym dla niemal każdego laboratorium na świecie.
Kluczem do sukcesu TROT-a jest jego modułowość. Większość elementów pasuje do siebie tylko w jeden sposób, co minimalizuje ryzyko błędu przy montażu i pozwala naukowcom bez wykształcenia inżynierskiego na szybkie zmiany konfiguracji. Jak zauważa Talia Moore, profesor robotyki i biolog ewolucyjny, w paleontologii kości mówią nam wiele o strukturze, ale prawie nic o wydajności ruchu wymarłych gatunków. Dzięki TROT-owi badacze mogą odtworzyć proporcje kończyn zwierząt sprzed milionów lat i sprawdzić, jak radziłyby sobie w biegu. Zmiany ewolucyjne, które w naturze zajmowały dziesiątki milionów lat, na tym robocie można zasymulować w zaledwie 20 minut, wymieniając kilka wydrukowanych modułów.
Rozwiązywanie zagadek natury, czyli dlaczego gepard biega inaczej niż koza?
Jednym z głównych powodów powstania projektu była chęć wyjaśnienia biomechanicznych zagadek, które od lat dręczą naukowców. Klasycznym przykładem jest eksperyment z 1974 roku, w którym porównywano gepardy i kozy. Prawa fizyki sugerują, że gepardy, mając kończyny zwężające się ku dołowi (z mniejszą masą z dala od biodra), powinny biegać znacznie efektywniej energetycznie. Tymczasem badania wykazały, że oba gatunki zużywają niemal tyle samo energii.
Czytaj też: Gino 1 to chiński sposób na rewolucję w magazynach
Problem polega na tym, że w żywym organizmie zmienia się zbyt wiele zmiennych naraz: masa mięśniowa, właściwości ścięgien, a nawet metabolizm. TROT pozwala wyizolować tylko jedną cechę – na przykład rozkład masy w nodze – i zmierzyć jej wpływ na ruch, podczas gdy cała reszta parametrów pozostaje identyczna. Aby wiernie oddać sprężystość mięśni bez używania fizycznych sprężyn (które mogłyby przekłamywać pomiary), naukowcy zastosowali silniki o wysokiej podatności. Pozwalają one na odzysk energii podczas ruchu powrotnego, co idealnie naśladuje zachowanie biologicznych tkanek.

Wiedza dla nauki i nie tylko
Choć TROT jest przede wszystkim narzędziem badawczym i edukacyjnym, jego wpływ na komercyjną robotykę może być ogromny. Większość dzisiejszych robotów czworonożnych ma niemal identyczne przednie i tylne nogi. Dzięki platformom takim jak TROT, inżynierowie mogą teraz sprawdzić, czy wyspecjalizowane, asymetryczne kończyny poprawiłyby osiągi maszyn przemysłowych na tyle, by uzasadnić większą złożoność ich produkcji.
Czytaj też: Tiangong 3.0 wyznacza nową erę robotów, które „czują” dotyk i biegają maratony
Co warto tu jeszcze wspomnieć, zespół Moore zdecydował się udostępnić plany konstrukcyjne i oprogramowanie robota na zasadach otwartej nauki, publikując szczegóły w czasopiśmie „Bioinspiration and Biomimetics”. Oznacza to, że każda placówka badawcza czy nawet pasjonat z dostępem do drukarki 3D może zbudować własną wersję TROT i prowadzić eksperymenty. To swoista demokratyzacja zaawansowanych badań nad ruchem, która do niedawna wymagała dostępu do wyspecjalizowanych i drogich laboratoriów. Nie należy jednak spodziewać się, że takie roboty już jutro zastąpią tradycyjne metody. Raczej stanowią dla nich wartościowe, eksperymentalne uzupełnienie. Możliwe, że za kilka lat podobne platformy staną się powszechne w laboratoriach biomechaniki na całym świecie, ale na razie to dopiero początek ich drogi.