Opracowanie i montaż korony zębowej to obecnie kwestia co najmniej kilku wizyt. Najpierw stomatolog “opracowuje” ząb, pobiera wycisk lub wykonuje skan, a następnie nierzadko zakłada tymczasową koronę. Później pacjent wraca na kolejną stomatologiczną bitwę, by dokończyć zapoczątkowane dzieło. A co, gdyby dało się jeszcze bardziej skrócić czas potrzebny na cały zabieg? Naukowcy ze Szwajcarii opracowali rozwiązanie, które daje w tym zakresie imponujące możliwości.
Czytaj też: Czy mrożonki są gorsze od świeżych warzyw? Odpowiedź na to pytanie zaskoczyła nawet mnie
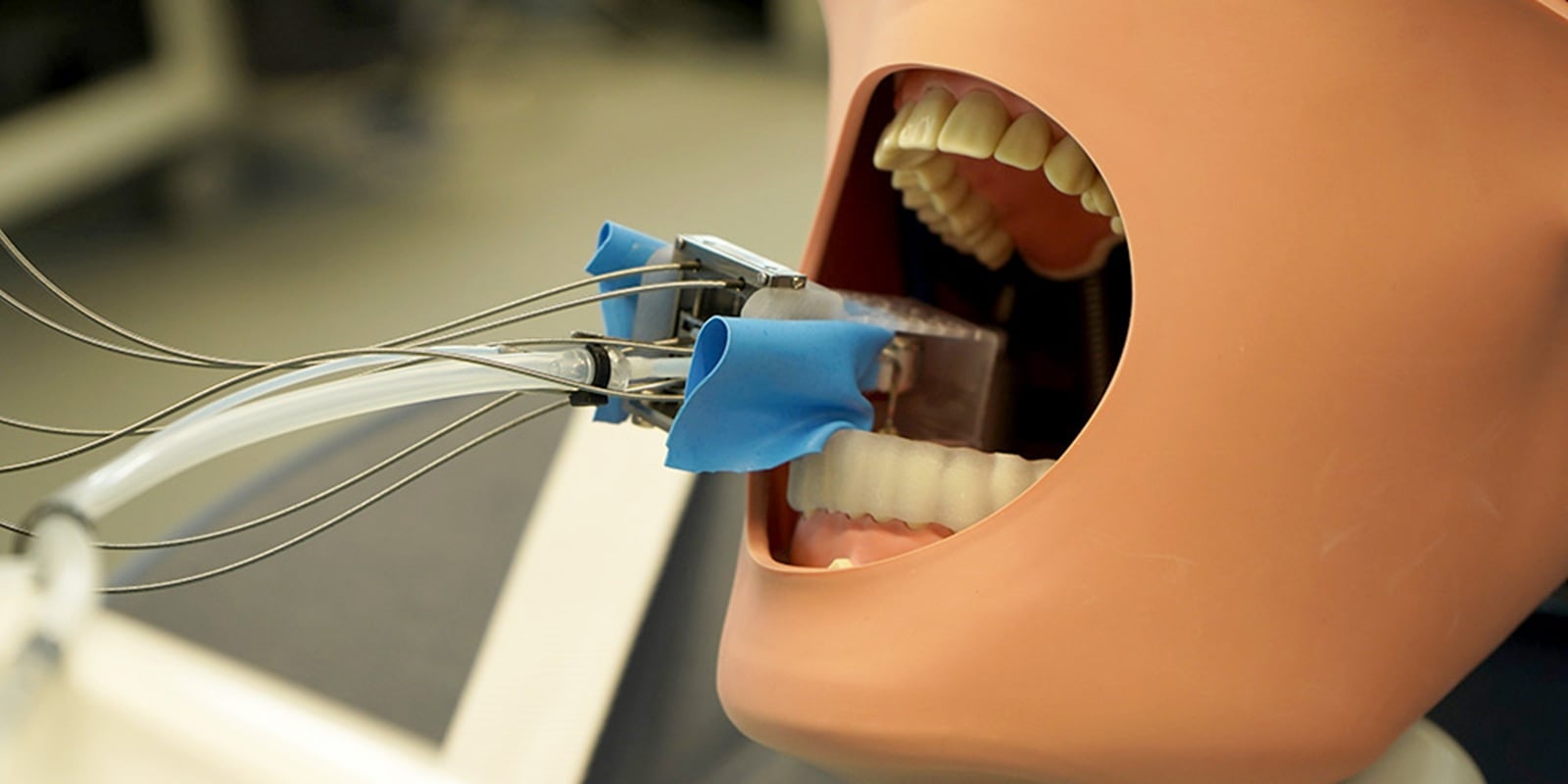
Przedstawiciele Uniwersytetu w Bazylei stanęli na czele zespołu badawczego, który stworzył miniaturowego robota stomatologicznego o nazwie MIR (Miniature Intraoral Robot). Urządzenie jest na tyle małe, iż mieści się wewnątrz jamy ustnej pacjenta, a jego zadaniem jest niezwykle precyzyjne przygotowanie zęba pod koronę zgodnie z wcześniej opracowanym cyfrowym planem leczenia. O kulisach funkcjonowania tej technologii czytamy w IEEE Transactions on Medical Robotics and Bionics.
Sam prototyp ma zaledwie 43 × 26 × 28 milimetrów, co stanowi rozmiar zbliżony do korka od butelki wina. Aby zachować tak niewielkie wymiary, silniki oraz układ sterowania znajdują się poza jamą ustną. Z robotem łączą je elastyczne wały napędowe, przewody i rurki, dzięki czemu urządzenie pozostaje lekkie i wystarczająco kompaktowe, by mogło pracować w bardzo ograniczonej przestrzeni.
Nowa technologia opiera się na cyfrowym planowaniu zabiegu. Podczas pierwszej wizyty stomatolog wykonuje trójwymiarowy skan uzębienia, na podstawie którego określa dokładny zakres opracowania zęba. Ten sam model cyfrowy pozwala również od razu zamówić docelową koronę, bez konieczności oczekiwania na zakończenie ręcznego opracowania. Następnie powstaje indywidualnie dopasowana szyna, do której mocowany jest robot. Dzięki temu urządzenie porusza się razem z pacjentem, nawet jeśli ten nieznacznie zmieni pozycję głowy podczas zabiegu.
MIR wykonuje pracę w dwóch etapach. Najpierw szersze wiertło usuwa materiał z górnej części zęba, a następnie dłuższe i cieńsze narzędzie opracowuje jego boczne powierzchnie. Takie rozwiązanie pozwala uzyskać odpowiedni kształt niezbędny do osadzenia korony przy zachowaniu wysokiej dokładności.
Dotychczas robot wziął udział w testach na modelach wykonanych z żywicy syntetycznej, a także na materiale ceramicznym, którego twardość odpowiada szkliwu ludzkiego zęba. Pierwsze wnioski? Bardzo obiecujące. Mimo że urządzenie nie posiada jeszcze czujników kontrolujących jego położenie w czasie rzeczywistym, błąd pozycjonowania wyniósł mniej niż 0,2 milimetra. A przecież po dodaniu odpowiednich sensorów dokładność powinna jeszcze wzrosnąć.
Zespół odpowiedzialny za tę technologię analizował również siły powstające podczas wiercenia. W testach nie przekraczały one pięciu niutonów, co odpowiada mniej więcej ciężarowi półlitrowej butelki wody działającemu pod wpływem grawitacji. Naukowcy sprawdzają także poziom hałasu generowanego przez urządzenie, aby ocenić jego komfort i bezpieczeństwo podczas przyszłego zastosowania w gabinetach stomatologicznych. Nie ma się jednak nastawiać na szybkie wdrożenie tego typu rozwiązań. Najpierw inżynierowie będą musieli wyposażyć swojego robota w kamerę oraz zestaw czujników umożliwiających bieżące śledzenie jego położenia i automatyczne korygowanie ruchów.
Źródło:Uniwersytet w Bazylei